Universal Motors: Construction, Types, Working, and Applications
Last Updated on September 12, 2021 by Engr. Shahzada Fahad
Table of Contents
Universal motors:
Universal motors is specially designed series motor that operates approximately same speed and output on either alternating and direct current driving all kinds of machinery. It has variable speed and high starting torque characteristics. It runs at dangerously high speed on no load that is why such motors are usually built in to the device they drive. In fact it is smaller version of the ac series motor.
Basics of AC series motor:
If an ordinary dc motor were connected to an AC supply. It will exert and rotate a unidirectional torque because the current flowing both the armature and field reverse at the same time. However torque developed is not of constant magnitude (as in series dc motor) but pulsates between zero and maximum value each half cycle. But the performance of such motors will not be satisfactory for the following reason:
- The alternating flux would cause excessive eddy current loss in the yoke and field cores which will become extremely heated.
- Vicious sparking will occur at brushes because of the huge voltage and current induced in the short circuited armature coils during their commutation periods.
- Power factor is low because high inductance of the field and armature circuits.
- However by proper modification of design and other refinements a satisfactory single motor has been produced.
- The eddy current loss has been reduced by laminating the entire iron structure of the field core and yoke
- Power factor improvement is possible only by reducing the magnitudes of the reactance of the field and armature winding
- Field reactance is reduced by reducing the number of turns on the field of field windings
- For given current it will reduce the field mmf which will result in reduced air gap flux.
- This will tend to increase the speed but reduce motor torque. To obtain the same torque it will now be necessary to increase the number of the armature turns proportionality.
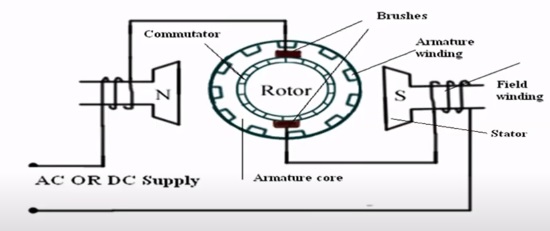
Construction of the universal motor:
The stator consists of field winding having the field poles. The winding is provided to produce magnetic field in the motor. Rotor is nothing but the armature having the armature core laminated armature core is used with number of sluts. In those sluts the armature winding is provided and the commutator is given with it. The winding connection is connected to the commutator. The brushes are used to provide the supply connection to the armature winding.
Stator: field winding to generate magnetic field.
Rotor: armature winding with current through carbon brushes to generate magnetic field.
Brushes: mechanical linking to power supply and rotor winding, commutator and compensating winding.
They usually have a stationary field called a stator which is connected directly to the supply voltage in the rotor also called armature which receives the supply voltage through a commutator. When the armature rotates makes the necessary polarity reversals for the armature to continue turning. let’s assume our motor will only run on direct current first let’s connect the stator to the power supply for simplicity we will think of it as a battery depending of the winding direction the stator will become an electromagnet. In this case the electromagnet North Pole is up in the South Pole is down as long as it is connected to the power supply there will be a North Pole at the top in a south pole at the bottom. now let’s look at the armature in the middle of the magnetic field of the electromagnet through the commutator we connect the armature winding to the power supply again imagine that the direction of the winding is such that in the armature we have a north pole at the top and South Pole at the bottom. The brushes are slightly offset clockwise saw the rejection between the two north poles. In the two South Poles forces the armature to rotate clockwise the armature will rotate 180 degrees trying to keep the North Pole facing the South Pole in the South Pole facing the North Pole with these two things will happen due to the weight of the armature. The inertia will cause the armature to rotate a little bit more than 180 degrees in addition the commutator will reverse the connections so the North Pole will again appear at the top in the South Pole at the bottom this action is repeated indefinitely while the stator and brushes continue connected to the power source. To make the armature turn counterclockwise simply reverse the wires connected to the brushes or you can also reverse its rotation by reversing the wires that go to the stator if instead of using a battery we connect our motor to a source of alternating current the result will be the same since what really makes it work is the relative polarity in the magnetic field of the stator and the magnetic field of the rotor of the armature this is basically the sequence of operation of a brush electric motor also called a universal motor. Since it works both on direct and alternating current generally the most common use motors or the series wound that is with the stator and armature connected in series. These are high starting torque motors and are mainly used as a starter for internal combustion engines in also import ball drills in appliances such as mixers blenders etc.
Types of universal motors according to construction:
- Concentrated pole, non-compensating
- Distributed, field compensating
Non-compensating with concentrated pole:
In this type the salient poles are provided and laminated poles are there to reduce the eddy current losses. Because we are using this motor for both ac and dc power supply when we use ac supply it will create heat due to eddy current losses. Generally to reduce the eddy current losses laminated part is used.
In the second diagram in which we have armature which is nothing but rotor the armature and field winding is connected in series.

Compensated type with distributed field:
Compensating winding is provided that is connected in series with the main field winding. In the first figure the compensating winding is given with the field winding. Generally the compensating winding is used to reduce reactance voltage present in the armature then the motor runs at the ac supply. As the frequency increases the reactance will increase and due to that the voltage across that winding increases. The compensating winding is used to reduce the reactance present in the armature. We can also reduce it by using less number of turns for that winding.

In the second diagram we can see that the armature, main field winding and compensating winding are connected in series. We can connect single phase ac supply or dc supply for that motor. So that’s why the universal name is given because it is used for both ac and dc.
Working of the universal motor:
The series field winding will used to create the magnetic field. North and South Pole is created by using that winding. The armature conductor is connected with the commutator through brushes. We can connect the ac or dc supply with it.

Now if we connect the dc supply to this motor the working is same as the dc motor. Whenever a current carrying conductor is place in the magnetic field mechanical force is created on that current carrying conductor. We can found the direction of motion or the force which is created on the current carrying conductor by using Fleming left hand rule which state that if we place three fingers middle finger, forth finger and thumb perpendicular to each other of the left hand. Then the forth finger indicates the direction of the magnetic field, middle finger indicates the direction of the current and thumb indicates the force which is produce on the current carrying conductor. In the magnetic field the force produce on the current carrying conductor is upward and the magnetic flux which is produce due to the main winding having direction left side.
If we connect the ac supply to that motor the direction of the current through the series field winding and armature winding both are reverse for positive and negative cycle. So the torque which is created on the current carrying conductor has the same direction. So we can say that unidirectional torque is produce due to positive and negative cycle.
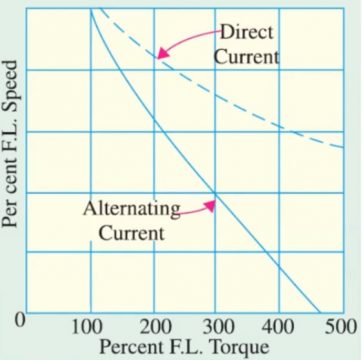
Speed characteristics of the universal motor:
The speed is inversely proportional to the armature current. Speed is also inversely proportional to torque. The gears are used to get the required speed for required load. The speed of a universal motor varies just like that of a dc series motor i.e low at full load and high on no load (about 20000 rpm in some cases). Generally these motors are run with the load at the starting because these motors run with very large speed. In fact on no load the speed is limited only by its own friction and windage load. Figure shows typical torque characteristics of a universal motor both for ac and dc supply. Usually gear trains are used to reduce the actual load speed to proper values.
In universal motors when we increase the load the speed will decrease. If we want that the universal motors operate in the similar way. This is possible when we operate the motor with high speed.
Reversal of rotation:
The concentrated pole or salient pole type universal motor may be reversed by reversing the flow of current through either armature or field winding. The usual method is to interchange the leads on the brush holders.

Universal motors applications:
- Universal motors are used in Vacuum cleaners where actual motor speed is the load speed
Other application where motor speed is reduced by gear trains is:
- It is also used in polishers, blowers and kitchen appliances
- Sewing machines
- Fans
- Hair dryer
- The high rating universal motors are used in blender and Portable drills
- Motion picture projectors
- Food mixtures and blinders
Advantage of the universal motors:
- Simple structure
- Robust
- Small size
- Portable
- Rotates more than 3000 to 20000 rpm
Disadvantage of the universal motors:
- Sparking occur between brushes and commutator due to their imperfect contact leads to noise while running
- As result life of brushes will reduce
- High maintenance is require
- High brush temperature resulted in limited life time
Discover more from Electronic Clinic
Subscribe to get the latest posts sent to your email.
thank you somuch
This blog post on Universal Motors is incredibly informative! I love how it breaks down the construction and different types, making it easy to understand their working principles. The applications section really opened my eyes to their versatility in everyday devices. Great job!
Great post! I found the explanation of different types of universal motors particularly enlightening. It’s fascinating how their construction allows for both AC and DC operation. The applications you mentioned really highlight their versatility in everyday devices. Looking forward to more insights on motor technologies!
Great overview of universal motors! I found the explanation of their construction and working principles really helpful. It’s interesting to see the versatility of these motors in various applications. I didn’t realize they could operate on both AC and DC power. Looking forward to more posts like this!