Naze32 Quadcopter Drone PID tuning using Betaflight, How to PID Tune your Drone
Last Updated on September 21, 2024 by Engr. Shahzada Fahad
Table of Contents
Naze32 Quadcopter Drone PID Tuning:
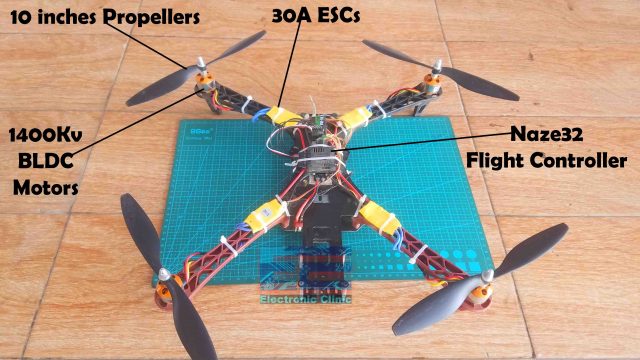
Naze32 Quadcopter Drone PID tuning using Betaflight, How to PID Tune your Drone- Previously, I built this Quadcopter drone using Naze32 Rev6 Flight Controller board. I used low-cost unbranded 1400kv brushless motors and unbranded 10 inches propellers which are mostly unbalanced and seriously I have never seen pro-FPV Drone pilots using these propellers.
Let’s forget about all these issues which come with these unbranded motors and propellers and let’s just focus on, that you have just built a Quadcopter Drone like this as you are low on budget and you are not in a good condition to invest more unless you improve your piloting skills, because you will never want to damage the expensive electronics parts.
Almost 99% of the new drone makers start with the default PID settings or they start using PID settings of other pro drone pilots. Don’t do this, unless you are using the same frame, the same motors, propellers, and ESCs. If your drone parts are different then their PID values will never work for you.
To explain this, I started with the default PID values. Of course I was able to fly this drone as I have been practicing for a while, but I had to constantly adjust the control sticks, as the drone was drifting a lot and you can see there are lots of vibrations ”Watch video given at the end of this article” and when the drone is in the Acro mode it becomes very hard to control the Drone.
So, if you are a beginner and you are going to fly your Naze32 based Quadcopter Drone with the default PID values then this is what will happen to your Drone, your drone will starting twitching and fallout of sky. Let me know in a comment if the same thing has happened to you.
So, in this article, I will explain how to PID Tune your Naze32 Quadcopter Drone and get rid of the unnecessary drifting and vibrations using BetaFlight configurator.
Drone Flight Test after PID Tuning:

You can watch my Naze32 based Quadcopter Drone first flight test after PID tuning in video given at the end of this article. It really improved the performance and now, I don’t see any drifting on the Roll, Yaw, and Pitch Axis; most of the vibrations are gone, some vibration is there which is due to the low quality propellers, frame, ESCs, and motors. The small quick movements or jerks are not due to the vibrations, these are due to my input signals, as I am constantly adjusting the control sticks, as right now I am flying this Quadcopter in the Acro Mode. I have never felt so confident before and seriously for the first time the drone is in my full control as there is no drifting. Seriously, for the first time I used the Yaw stick, I have never used it before. Just go and check my videos.
So, as a beginner, if you really want to improve your Drone piloting skills then at least get rid of the Drone drifting issue which can only be done through PID tuning.
I am also a beginner like you guys, I am still not able to perform those flips and rolls. But, after this PID tuning now I can do things which I have never tried before and to be very frank this is for the first time I didn’t crash my Drone as there is no twitching problem, no excessive vibrations, and no drifting. For the next few days I will practice with these PID settings and I am sure this will improve my Drone flying skills before I build an FPV drone.
So, anyways, here is my Drone and now I am going to explain how to do the PID tuning. Without any further delay, let’s get started!!!
Amazon Links:
X500 Alien and other top Quadcopter Frame
1000KV Brushless Motor, 30A Speed controller, and Propellers
Flysky FS i6 Transmitter and Receiver
Other Tools and Components:
Super Starter kit for Beginners
PCB small portable drill machines
*Please Note: These are affiliate links. I may make a commission if you buy the components through these links. I would appreciate your support in this way!
Connect your Naze32 flight controller with the laptop and open the Betaflight Configurator. Click on the connect button. All the other settings I have already explained in my previous article.
Naze32 PID Tuning:
While your Betaflight Configurator is opened, click on the PID Tuning. In the PID settings you can see we have these different parameters; Proportional, Integral, Derivate, RC Rate, Super Rate, and RC Expo.
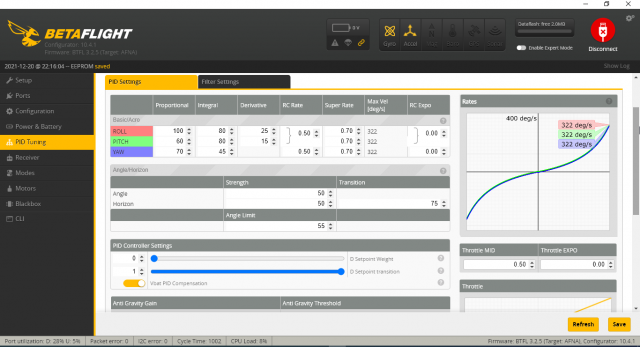
The Super Rate I have already explained. Right now I will only talk about the Proportional, Integral, Derivative, and the Anti-Gravity. The Anti-Gravity feature is available in the configuration and I will talk about it in detail once I cover the PID settings.
Trust me if you learn how to play with these Proportional, Integral, and Derivate values then you can PID tune any type of Drone. The P, I, and D values which you can currently see works good for me and now I will explain how I selected these values. Let’s first start with the proportional.
Let’s first understand what is Proportional or P gain or P term in the PIDs. So the P term is proportional to the magnitude of error. When the error is big the P term pushes harder and when the error is small the P term doesn’t push it hard to get the system to approach the set point. So, what happens when you have high P values, for any given error the P term pushes on the system so hard to cause the error to reduce and it pushes so hard and it overshoots and then it pushes so hard to turn around the other way and then it overshoots the other way and as a result you will get oscillations. P-term doesn’t alone fix the issue, it works with the D term or D gain.
The main effect of the D-term is that it reduces the P-term overshoot and oscillation. So, while playing with the P-term values leave the D-term values to their default values and start increasing the P-term values only 10 points at a time. Keep increasing the values and I am sure you will see the improvement. So, keep increasing the values until you feel like now it’s getting worse, then at this point you need to back off. Now, after you have almost set the P-term values, now closely observe your drone if it has oscillation on the Pitch axis or on the Roll axis, and then accordingly increase or decrease the values. It’s like a hit and trial method, it may take a lot of time to find the perfect PID values. This is the only way to fully understand how these different values affect the overall performance of the Drone.
It’s simple, if you have oscillations on the Pitch axis simply change the value next to the Pitch in the Proportional column, and if you have oscillation on the Roll axis then simply keep changing the value next to the Roll. So, after you have fixed maximum of the oscillations, you will feel it when you fly the Drone. Next, you will need to check if your drone is drifting on the Pitch axis or Roll axis or Yaw axis.
So, if the I-term value is not set properly, your drone will drift and this is the kind of issue which is faced by almost every beginner. All you need to do is, just look at your drone when you apply the throttle and if your drone is drifting on the pitch axis or on the roll axis or on the Yaw axis. This means you have to set the I-term values.
So, let’s say your drone is drifting to the right side by itself, all you need is to change the value next to the Roll in the I-term column and closely observe if the drifting is increasing or decreasing as you try different values, you will feel it. So, keep on changing the value until you are satisfied. Then repeat the same steps for the Pitch and Yaw if you see any drifting. So, the I-term will fix all the drifting issues. I didn’t explain the whole science because I don’t want to confuse you; just play with these values and you will understand by yourself. Now, let’s take a look at the Anti-Gravity feature.
Anti-Gravity Feature:
Now, go to the configuration, scroll down, and on the other features, you will find this Anti-Gravity feature.
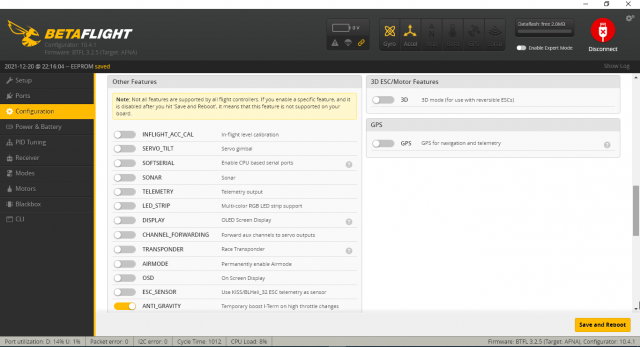
Even if you have the default PID settings, still you need to activate this Anti-gravity feature. Now what it does, is that, when you rapidly move the throttle stick the nose will pitch up or pitch down which is really not good at all, now to avoid such quick changes on the pitch axis and sometimes you will see it on the Yaw axis too, you need to activate the Anti-gravity feature. This will solve the drifting issue on the pitch and yaw axis when you quickly increase the throttle. Actually, the I-term in the PID tuning, take care of these changes, but the I-term responds slowly, so it’s not quite perfect to solve this problem alone and that’s where the anti-gravity comes in and provides a short temporary boost to the I-term when the throttle moves faster than a certain amount. So, you need to activate this feature, and don’t forget to save the changes. So, that’s all for now. I have already shared the test results. There are some other settings that I will explain in my next video.
Watch Video Tutorial:
Discover more from Electronic Clinic
Subscribe to get the latest posts sent to your email.



