DC Motor, Direct Current Motor: DC Motor Construction and Types
Last Updated on October 14, 2020 by Engr. Shahzada Fahad
Table of Contents
Direct current motors:
The direct current motors simply means a motor that uses direct current which convert electrical energy into mechanical energy. We can use the direct current motors in our power tools, our toy car, and even in our cooling fans. DC motors are very popular in automatic machines because of:
- Fast reaction
- Better speed control
- Simple construction
When a DC voltage is given to the input terminals of the DC Motor. The voltage pushes the dc current to flow in the winding of dc motor. The winding create their own magnetic field, due to interaction of these magnetic fields and electromagnetic torque acts on the rotor and rotor rotates, in this way the given electrical energy is converted into mechanical energy.
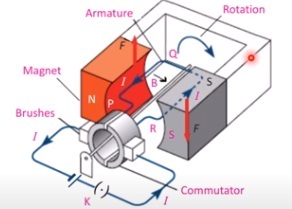
Working Principal:
When a current carrying coil is placed inside some magnetic field a force acts on it due to the interaction between the magnetic field of coil and external magnetic field.
Construction of DC motor:
DC motor consists of:
- Permanent magnet
- Split rings
- Coil or armature
- Carbon brushes
When we look at a dc motor, we first see the metal protecting casing which is the outer part of the DC motor and is usually static, forms the stator which have frame and Inver projected pole core of these pole is made up of silicon steels on which insulated copper wire is used to make winding these poles are bolted and fixed inside the frame. When the current will pass through it magnetic field will be produced.
There are two sides of the pole main or field pole and inter pole the connection of these poles are outside through the connectors so that we can give electric supply to them. When pole create static magnetic field when the current passes through winding in this magnetic field the rotor which is made up number of stamping of highly permeable materials of silicon steel which allows the magnetic field passes through it easily. Slots are cut on the outer part of the armature to receive coil of the copper conductor.
Each coil is connected by the external dc source commutator segments arrange in form of ring. This complete assembly is housed over the cylindrical shaft by high quality of steel because of the bearings both sides of the shaft can be capable to rotate by the field poles At one end we have the tip of the sharp protrouding through the casing we can attach gears fan blades or even pulleys on to this on the other end we have a plastic end cap with two terminals we can connect the power supply to these terminals to rotate the sharp.
If we remove the casing to look inside the motor we first find two magnets, which are permanent magnets which forms a north and south pole. Running through the centre of the motor is a rod which is called the shaft. The shaft is used to transfer mechanical energy attached to the shaft. We have rotor, The rotor is made from a number of disks which are laminated together. The armature takes direct current to produce electromagnetic torque.
There are several methods of exciting the stator winding of a dc machine of which series and shunt connections are especially important associated with these connections we can relate the speed of rotation to the field current and the torque to the field and armature currents. It follows that each method of field connection produces different characteristics.
In this article we shall consider the derivation of the speed and torque characteristics of DC machines, the methods of speed control, and the means of analysing the operation. The ability to control such speed with great accuracy had such property in the past. In more recent times power electronics circuits have provided means of controlling the speed of dc machines with greater efficiency and we shall consider such circuit arrangements.
Armature and field connections:
The general arrangement of the four brushes and field connections of a four pole machine make contact with the commutator. Positive brushes are connected to the positive terminal A and the negative brushes to the negative A1. It will be seen that the brushes are situated approximately in line with the centres of the poles. The position enables them to make contact with conductors in which little or no emf is being generated since these conductors are then moving between poles.
The four exciting or fields coils C are usually joined in series and the ends are brought out to terminals F and F1. These coils must be so connected as the direction of the field current when F is positive.
In general, we may divide the methods for connecting the field and armature windings into the following groups:
Separately excited machines:
A separately excited dc motor requires separately power supply for its operation indicating and they cannot be available everywhere this type of dc motor is rarely used. The source voltage is being connected with the field winding other than the armature of its own machine.
Self-excited machines:
Self-excited motor are mostly used because it requires single source for operation. We can self-excite motor in three ways. Self excited machines which may be subdivided into:
Shunt wound DC motor:
When the armature and the field winding are connected in parallel then it is known as shunt wound dc motor. Due to the same voltage across the field winding and armature the field resistance have higher resistance than the armature otherwise the maximum current will flow through field winding and armature will produce less torque. For higher resistance field winding must have a large number of turns after all the field winding produce static torque whose flux is proportional to turns and current. It will use thin wire to reduce current. We must use large number of turns this motor is capable of to maintain constant speed. It’s speed regulation is very good.

Series wound DC motor:
When armature and field winding are connected in series then it is called series dc motor. Due to the same current flow through the field winding and armature the field winding must have low resistance otherwise the current through armature will be decrease and it result in again in the lower value of torque. When we have lower value of resistance field winding must have thicker wire and lesser number of turns. Series wound motor have also special property it’s starting is extremely high. Therefore it is best for the direct applications. Whereas its output torque decreases considerably when we increase the speed.

Compound wound DC motor:
Good speed and high torque can be gain from the compound wound motor. For this type the field winding are divided into two parts one part is connected in shunt and other part in series. As discussed before the shunt winding have thin wires with the large number of turns and series winding have thick wire with less number of turns. This type of motor is best suited for rolling mills and load which requires large momentary torque. A combination of shunt and series windings.

Speed of motor:
With very few exceptions dc motors are compound wound, shunt or series. It is good practice to include starters in the diagram of motor connections. In compound motors the series and shunt windings almost invariably assist each other in series motors the flux increases at first in proportion to the current and then less rapidly owing to magnetic saturation. Hence the speed is decrease when the current value is increase which shows us that there is inverse relation of the speed with the current. The speed characteristics of a motor usually represent the variation of speed with the input current or input power and its shape can easily be derived. It was seen that if the load falls to a very small the speed may become dangerously high. A series motor should therefore not be employed when there is any such risk for instance it should never be coupled to its load except in very small machines such as vacuum cleaner.
The relationship between the generated emf, speed, flux etc is represented by:
E=2 (ZNr PΦ)/60c
Here p is the number of poles, n is the number of turns, Φ is the flux, z is the number of conductance and c is the number of parallel path.
For a given machine Z, c and p are fixed in such a case we write:
E=kNr Φ
k=2 Zp/60c
V=kNr Φ+Ia Ra
N_r=(V-Ia Ra)/kΦ
The value of IaRa is usually less than 5 percent of the terminal voltage V so that
Nr⍺V/Φ
In words this expression means that the speed of an electric motor is approximately inversely proportional to the flux and proportional to the voltage applied to the armature.
Torque equation of DC motor:
Torque is the turning or twisting about the axis. Torque is product of the distance and force. When a current carrying conductor is placed in the magnetic field placed in the magnetic field a force is exerted on it.
Since the flux in a shunt motor is practically independent of the armature current torque of a shunt motor is proportional to the armature current . In series motor thee flux is proportional to the square of the armature current. The torque does not increase so rapidly above full load magnetic saturation.
This torque is produced due to the electromagnetic effect hence it is called electromagnetic torque.
V= Eb + IaRa
Multiplying both side by Ia
VIa= EbIa + I2aRa
VIa= total electric power supplied to the armature
EbIa= mechanical power developed by the armature
I2aRa= losses due to the armature resistance
Mechanical power can be given as in terms of torque T and speed n.
Pm=ωT
Pm=2πnT
Eb Ia=2πnT
Where n=N/60
Eb=ΦzNP/60A
ΦzNP/60A Ia=2πnT
T=(ΦzPIa)/2πA
k=zP/2πA
T=kΦIa
Speed control of DC motor:
A variable resistor termed a field regulator in series with the shunt winding only applicable to shunt and compound motors. Such a field regulator is indicated by H. the generated emf and flux will be reduced when the resistance is increased the field current. Consequently more current flows through the armature the increased torque enables the armature to accelerate until the generated emf is again nearly equal to the applied voltage.
With this method it is possible to increase the speed to three or four times that at full excitation but it is not possible to increase the speed to three or four times that a full excitation but it is not possible to reduce the speed below the value. The speed at full load and no load will be approximately constant with any given setting of the regulator the speed.
A resistor termed a controller in series with armature. The electrical connections for a controller are exactly the same as for a starter, the only difference being that in a controller the resistor elements are designed to carry the armature current indefinitely whereas in starter they can only do so for a comparatively short time without getting excessively hot.
For a given armature current the larger the controller resistance in circuit the smaller is the potential difference across the armature and the lower in consequence is the speed.
This system has several disadvantages:
- The controller has relatively high cost which dissipate most of the energy
- The overall efficiency of the motor considerably reduced
- The speed may vary greatly with variation of load due to change in the potential across the controller causing a corresponding change in the potential difference across the motor.
If the supply voltage is 240V and if the current decrease so that the potential difference across the controller falls from say 100 to 140V then the potential difference across the motor increases from 140V to 200V.
The principal advantage of the system is that speed from zero upwards are easily obtainable and the method is chiefly used for controlling the speed of cranes hoists trains etc. where the motors is frequently started and where efficiency is of secondary importance.
When an AC supply is available the voltage applied to the armature can be controlled by thyristors. Briefly the thyristors is a solid state rectifier which is normally non conducting in the forward and reverse direction. It is provided with an extra electrode termed the gate so arranged that when a pulse of current is introduced into the gate circuit the thyristor is fires it conducts in the forward direction. Once it is fired the thyristor continues to conduct until the current falls below the holding value.

A simple arrangement for controlling a dc motor from a single phase supply. Field winding F is separately excited via bridge connected rectifiers J and armature A is supplied via the thyristor T. current pulse once after every cycle is supplied by the firing circuit which connected with the Gate G of the thyristor. The arrangement of the firing circuit is not shown as it is too involved for inclusion. R and L represent the resistance and inductance respectively of the armature winding and an external inductor that may be inserted to increase the inductance of the circuit. A diode d is connected across the armature and the inductor.

Electric motors efficiency importance:
The efficiency is very important for dc motors. The world is facing a serious energy challenge. Demand for electricity go faster than for any other form or final energy. Pressure to reduce the energy consumption and lower carbon dioxide emissions come from everywhere. The simplest way to address this challenge is to seize the opportunities for energy reduction that comes from use energy more efficient.
Over 40% of energy is consumed by industry and two third of that energy is used by the electric motors by increasing efficiency using more efficient motors it would be possible to realize huge saving in both energy and carbon dioxide emissions. This has prompted government to introduce minimum performance energy standards setting mandatory minimum efficiency levels for electric motors.
So what is the motor efficiency?
Efficiency is the simply ratio of output power to the input power and presented as percentage. Let’s take standard motor with a 75KW output. Achieving this output requires a power input 80.9KW. By using the formula we can calculate the efficiency:
Efficiency = (output power / input power) x 100
Efficiency = (75/80.9) x 100
Efficiency = 92.7%
This also means that the power loss amount to 5.9 KW. So where does these losses comes from and how can they be minimized to increase the motor efficiency?
We will try to explain that in a simplify way. The no load losses shown here are amount constant regardless of the motor load. Stator iron losses are present due to the energy required to magnetize the core material and includes losses due to creation of eddy current that flow in the core. They can be decreased by using better and thinner electromagnetic steel and lengthening the iron core. Friction losses are present due to the friction in the bearing and shaft seals and can be reduced by current dimensioning and selection of bearings. Windage losses are caused by air resistance in the fans, and can be reduced by optimized fan and air flow design. After the no load losses we have the load losses and here there are three types:
Stator winding losses or I2R losses are present due the current flow through the resistance of stator winding. They can be reduced by optimizing stator slot design with the windings tightly packed to ensure a good slot fill in ratio, together with an optimized iron core to maximize strength of the magnetic field.
Rotor losses:
The rotor also suffers I2R losses caused by rotor currents as well as iron losses caused by the magnetic flux interacting with the rotor core. They can be reduced by increasing the size of the conductive bars and end rings to produce lower resistance.
Additionally load losses or stray losses are present due to the leakage flux caused by variation in the windings, mechanical imperfections in the air gap and irregularities in the air gap flux density. They can be reduced by improving slot geometry and minimizing deviation in the air gap. Unfortunately losses are inevitable part of running motor and since they affect the efficiency, manufacturers of premium motors do their very best to them. By using higher quality materials cutting edge motor designs and manufacturing in high precision automated factories losses are kept to minimum. This means that with every successive generation of motor design efficiency gets improved and contributes to solving part of the global energy challenge.
Discover more from Electronic Clinic
Subscribe to get the latest posts sent to your email.