DIY Racing Drone using Naze32, Puda Rooster 230, EMAX Motors 2600kv
Last Updated on September 21, 2024 by Engr. Shahzada Fahad
Table of Contents
DIY Racing Drone, Description:
DIY Racing Drone using Naze32, Puda Rooster 230, EMAX Motors 2600kv- In this tutorial, you will learn how to make a racing drone using Naze32 Flight Controller, EMAX 2nd generation 2600kv motors, 30A ESCs, Flysky Fs-i6 Transmitter and receiver, 5×4.2 inches propellers, and the Puda Rooster 230 Carbon Fiber frame. Before, I am going to explain how to build this racing drone; first, I would like to share with you some useful information which I believe as a beginner you should know.

For the last few months, I have been using this Quadcopter frame with different flight controllers to learn the very basics and to improve my piloting skills. Along this journey, I faced so many issues, crashed my drone so many times, burned a couple of motors, and damaged so many propellers. From all these issues and damages I learned a lot of new things which I have already shared with you guys in my previous articles. Just go and read my articles on CC3D flight controller, KK 2.1.5 Flight Controller, and Naze32 Rev6 Flight Controller. These flight controllers are best for beginners.
Anyways, with all these flight controllers, I was facing some kind of issues that were stopping me from building this racing drone. Those issues were,
- Drone Motors twitching
- Excessive vibrations and oscillations.
- Drone drifting on the Roll, Yaw, and Pitch axis.
The motors twitching problem I fixed by using branded motors and propellers. But the vibrations and drifting issues were hard to fix. This was due to my mistake, as I was flying my drone with the default PID settings. So, I started studying the PID values, and then finally, I learned how to PID tune a Quadcopter drone. In my last article, I explained how to do PID settings for the Naze32 flight controller and since then I am feeling pretty confident, as I am able to fully control my Quadcopter drone, but, still, I am not able to do the flips and rolls.
So, anyway, after learning the basics and improving my piloting skills, I decided to build myself a racing drone. Before, I am going to share with you the flight test results of my new racing drone, first, a few words about the sponsor of this project, for helping me purchase the required components and tools.
It’s a nice cloudy day and I have to complete my final tests before it’s going to start raining. In images you can’t see the performance of this racing done, I highly recommend watch my video given at the end of this article.

I was amazed at its stability, there are no vibrations and oscillations, and I don’t see any drifting on the Roll, Pitch, and Yaw axis. The stability which you can see right now is just because of the PID tuning, which I will explain later in this article.
Now, let’s check the speed and the overall performance of this drone up in the air. This Drone is super fast and I will have to practice more to control this mini beast. Although, I am a beginner drone pilot, but yet I am able to control it to some extent and this is just because of the perfect PID tuning. No, humans and animals are harmed while making this video ;).
Anyways, I continued to perform the tests, but seriously I didn’t find any problems with the drone, but there is no doubt I am a bad drone pilot and I will have to practice for a few more days before I convert this drone into an FPV racing drone. For now, I will continue with these simple beginners level flights, right now I can’t even think of flips and rolls, that’s a pro-level job. Anyways, you can see the drone is pretty stable and it’s very controllable.
This is really a low-budget racing drone especially for the beginners like me, which you can also convert into any FPV racing drone in the future. So, if you are just starting with the racing drone then this is the type of drone you should start with and it’s very easy to build, I will share with you each and every detail. Anyways, I have been flying this racing drone for more than 10 minutes and I didn’t see any motors twitching, no drifting issues, no excessive vibrations, and oscillations. This means my first racing drone is quite a success.
So, here is my drone and the flight test results are just in front of you. So, if you think this is the type of beginner’s level racing drone that you are searching for then you can read the rest of the article as I am going to explain each and every detail. Without any further delay, let’s get started!!!
Amazon Links:
EMAX 2nd generation 2600kv motors
Flysky Fs-i6 Transmitter and receiver
Puda Rooster 230 Carbon Fiber frame
Other Tools and Components:
Super Starter kit for Beginners
PCB small portable drill machines
*Please Note: These are affiliate links. I may make a commission if you buy the components through these links. I would appreciate your support in this way!
Puda Rooster 230:

This is the 5 inch, Clone version of the PUDA Rooster 230 made of Aluminum and Carbon Fiber, so if you are just starting with a racing drone then this is the type of frame you should definitely start with. I assembled this frame in around 30 minutes, which is the easiest part.
The arms are 4mm thick while all the other plates are 2mm thick. The arms are nicely and tightly sandwiched between the top and bottom plates. There is also another plate on the top which is also 2mm thick.
The recommended motors are 2300KV to 2700Kv
The recommended ESCs are 30A
And finally, the battery which is the most important part, the manufacturer recommends 3S to 4S with mAh capacity from 1300mAh to 1500mAh. But, it doesn’t matter, you can use a greater mAh battery, if you need more flight time, but keep in mind, the battery should nicely fit on the top plate.

Look at my old battery, its 3S and 3300mAh and it’s just not compatible with this frame. It doesn’t mean I can’t fly this drone with this battery but it really doesn’t look good at all.

So, I purchased a new 3S Lipo battery pack, and its 1800mAh and this is perfectly compatible with this frame.
This frame is ideal for building an FPV racing drone, you can install a camera on the front. I will explain this in my upcoming article, once I learn how to control this mini beast, as this is the first time I am building a racing drone. Anyways, another camera you can fix on the top for recording high quality HD videos.
EMAX RS11 2306 2nd Generation 2600Kv Motors:

I have got these EMAX 2nd Generation 2600kv Brushless motors which are compatible with 3-4S Lipo battery packs and 5 to 5.5 inches propellers. These motors are lightweight; each motor weighs around 26.6 grams. The motors with Black color nuts are clockwise and the motors with Red color nuts are counterclockwise.
Specifications:
Framework: 12N14P
Length: 30.2mm
Diameter: 27.7mm
No. of cells: 3-4s 2300-2700kv range
No. of cells: 3-6s 1500-1900kv range
Propeller: 5″ – 5.5″
Light Weight: 26.6g (W/O Silicone Wire)
Prop adapter: M5
Bearing Shaft: 4mm
Shaft Thread: CW and CCW
Feature:
EZO bearing
Titanium shaft
Dual anodizing
16x16mm hole pattern
Single copper winding
115mm 20 AWG silicone wire
5×4.2 Transparent 3-Blade Propellers:

I got these 5×4.2 inches transparent tri-blades plastic clockwise and counter-clockwise propellers and these are perfectly compatible with my EMAX 2600kV motors. These propellers are strong, lightweight, ensure flexibility, and wing stability. These are high-end propellers, faster reaction offers Hi-Speed performance, well balanced, well-made, and durable to sustain crashes. These propellers are perfect for FPV racing Quadcopter drones.
Naze32 Rev6 Flight Controller:

I will use the same Naze32 Rev6 flight controller and the same Flysky receiver and transmitter. I have already explained how to make a Quadcopter drone using Naze32, and I have also explained how to do the PID settings.
30A ESCs:
I am also going to use the same 30A ESCs. Read my article on how to make a Quadcopter drone using CC3D flight controller, in that article, I have explained how to connect all the 4 ESCs with the distribution board. The same setup I also used with the KK 2.1.5 Flight controller and also with the Naze32 flight controller.
About the connections:
Since I am using the same flight controller, the same 30A ESCs, and the same Flysky FS-i6 receiver, so the connections will remain exactly the same as explained in my first article on the Naze32 flight controller based drone.

What I did this time, I shifted everything from this frame to this mini frame.
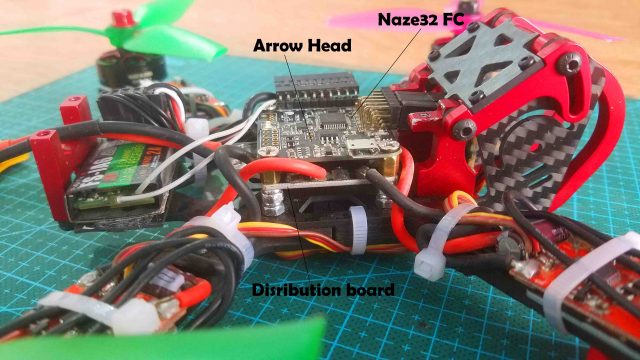
The distribution board and the Naze32 flight controller are perfectly compatible with the PUDA Rooster 230, that’s why I removed the cover. The arrowhead is towards the front of the drone frame.
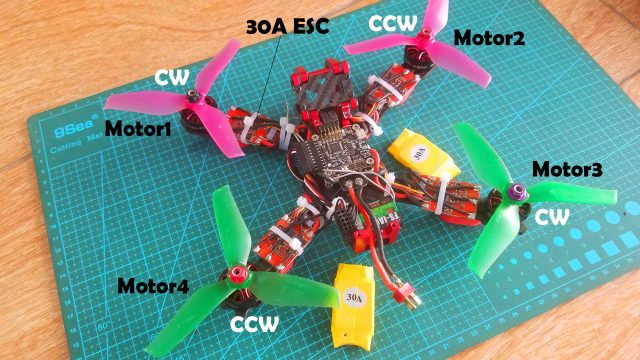
I am going with the same motors configuration. This is motor1, this is motor2, this is motor3, and this is motor4. Motor1 and Motor3 will be spinning in the Clockwise direction, while Motor2 and Motor4 will be spinning in the counterclockwise direction. So, motor1 is connected with channel1, motor2 with channel2, motor3 with channel3, and motor4 with channel4.
The 6 channels of the Flysky receiver are connected with the 6 channels of the Naze32 Flight controller, simply connect them in the same order.
These are the same 30A ESCs, this time I just removed the yellow color shrink tubes and directly soldered the motor wires.
As this time, I am using a new frame and new motors, so I did the motors calibration the same way as I did for the 1400kv motors.
PID Settings:
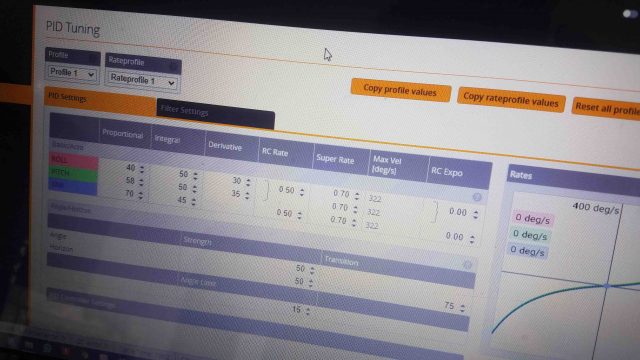
As usual, I am going to start with the default PID settings, and let’s see if there are any vibrations, oscillations, and drifting on the Yaw, Pitch, and Roll axis.
Racing Drone first flight test:
This is simply amazing, I don’t see any vibrations and oscillations, but the drone is drifting a lot on the roll axis, and this is something that I have to fix. The drone is not too sensitive to the control sticks and this is because I am using lower RC rate values.
Racing Drone 2nd flight test:
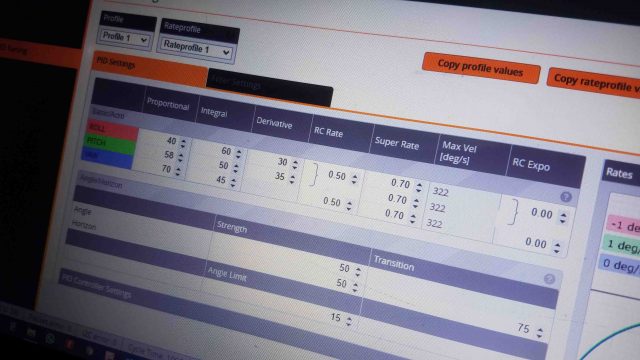
Since the integral takes care of the drifting issues and as my drone is drifting on the roll axis, so that’s why I increased the Roll value from 40 to 50 in the integral column. Let’s go ahead and check if it has made any difference.
Perfect seems like I am going in the right direction. The Drone drifting has decreased a lot and now the drone is quite controllable. But, still, I can see some drifting, so, let’s go ahead and increase the value.
Racing Drone 3rd Flight Test:
This time, I increased the value to 60.
It’s really improved; but, still, I am not satisfied, I have to play with the P-term and I-term values.
Watch test flights in the video given at the end of this article.
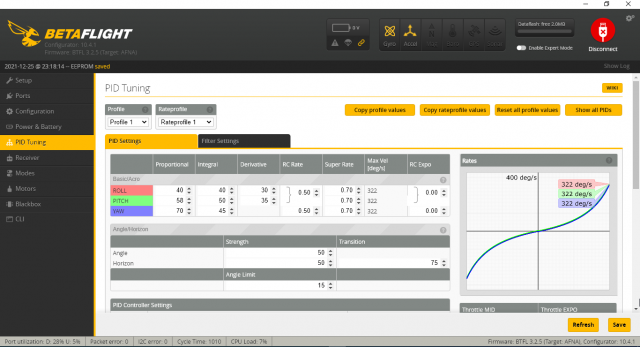
Racing Drone Final Flight Test:
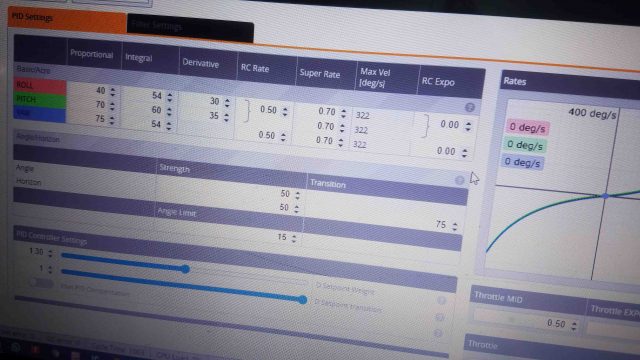
These are the final PID values that works best with the NAZE32 and PUDA Rooster 230 frame. This time I am going to some open place, and let’s see if I can control this mini beast as this is my first time flying a racing drone.
Watch Video Tutorial:

Discover more from Electronic Clinic
Subscribe to get the latest posts sent to your email.



