DJI 920Kv Motors and DJI Propellers with KK 2.1.5 Flight Controller
Last Updated on August 20, 2022 by Engr. Shahzada Fahad
Table of Contents
Drone Upgrade, Description:
KK 2.1.5 Flight Controller with Branded DJI 920Kv Motors and DJI Propellers- in my previous two articles, I explained how to make a Quadcopter Drone using CC3D OpenPilot flight controller and the KK 2.1.5 Flight Controller. Initially, I started with unbranded 1000Kv BLDC motors and unbranded propellers as these are cheap and almost more than 90% of the beginners start with such unbranded motors and propellers. I made a very fair comparison between the two flight controllers and finally I recommended KK 2.1.5 flight controller for the beginners as it’s easy to setup and you don’t need a computer or laptop. I checked the Quadcopter Drone stability with kk 2.1.5 FC installed on it and it was simply amazing, but still it had some issues, the motors were really getting hot, the motors would suddenly stop and then you can’t do anything about it and the next moment the Drone is badly crashed. You will also see the motors twitching problem a lot if you are not using branded motors and about the propellers I am sure you might have broken a lot of them because the same thing happened to me and this is the reason I decided to upgrade my Quadcopter Drone.

When selecting a flight controller we spent hours even days before making a final decision, and when it comes to the motors and propellers we just pick unbranded stuff, and then we start complaining about the flight controllers. I have been through all this and I am sharing with you my personal experience. You can read my previous article or watch a video for the test results.
In this article, I am going to upgrade my Quadcopter drone, I am going to replace the 1000Kv unbranded motors with the DJI 920KV brushless motors and I will also replace the unbranded propellers with the DJI propellers and then we will see if it’s going to make any difference. This upgrade is only on the hardware side, the flight controller setup will remain exactly the same. Without any further delay let’s get started!!!
Amazon Links:
X500 Alien and other top Quadcopter Frame
Flysky FS i6 Transmitter and Receiver
Other Tools and Components:
Super Starter kit for Beginners
PCB small portable drill machines
*Please Note: These are affiliate links. I may make a commission if you buy the components through these links. I would appreciate your support in this way!
Drone upgrade:
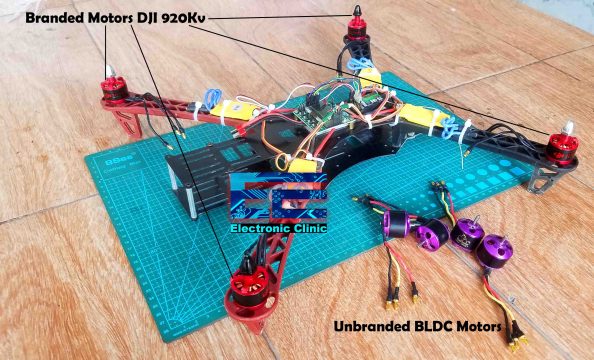
You can see all the 4 unbranded BLDC motors are replaced with the DJI 920Kv motors.
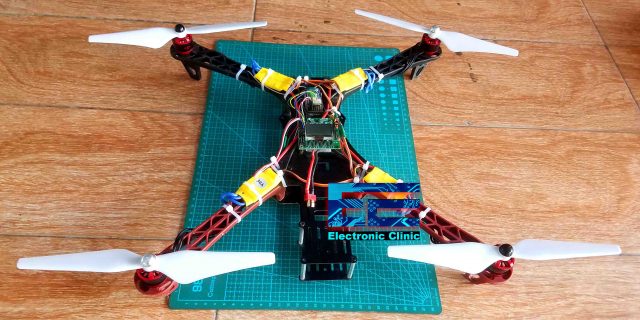
The propellers I am using are the DJI Phantom 3 compatible Propellers, these are self-tightening propellers, simply rotate the propellers by hand to attach or detach. Each propeller weighs 13 grams. If the motor is spinning in the clockwise direction then the prop should tight in the counterclockwise direction, so that’s why we have clockwise and counter-clockwise props, you can also see the props are also provided with the black and silver markings…my Quadcopter drone is ready.
Flight Test Result:
For the flight test result watch video tutorial given at the end of this article.
Prior to the flight test, I only did the ESC calibration. I have been flying this Drone for a couple of days and I didn’t see that twitching problem, and the sudden motor stop thing and the quick movements you can see are because I am still learning how to fly a Drone in self-level mode and Acro mode. I am just a beginner. So my friends you have already spent a lot on purchasing a good Quadcopter drone Frame, Flight Controller, Wireless receiver and transmitter, then don’t save a few bucks when it comes to the motors, props, and ESCs.
Anyways, flying a Drone in the self- level mode is very easy I tried it for a few days just to learn the very basics and now I am trying to fly this Quadcopter in the Acro mode which is really difficult and I am constantly crashing my drone but the motors and props are still doing great, this is the main advantage of using the branded motors and props.
One quick tip, if in the future you want to make a racing drone then stop using the self-level mode, just start flying your drone in the Acro mode and this is what I am doing right now, After improving my skills then I will make the Racing drone, and then I will shift to the FPV drones. So, that’s all, for now.
Watch Video Tutorial:

Discover more from Electronic Clinic
Subscribe to get the latest posts sent to your email.



