Electro-Mechanical Relay Construction and Working
Last Updated on August 19, 2024 by Engr. Shahzada Fahad
Table of Contents
Description:
Every Person nowadays is familiar with the term Relay, Electro-mechanical relays are most commonly used for switching purposes and are also used for protection. The relay switching operation can be manual or automatic depending on the use. The manual operation makes use of the push buttons or other conventional switches available in the market. But mostly relays are used in automatic operations.

Relay is an Electro-mechanical Device which has mechanical components like spring, contacts and a coil. The Electro-mechanical relay works just like an ordinary switch but the only difference is that it can be controlled automatically through a signal. A relay can control a circuit, device, machine, etc by opening or closing the Electro-mechanical relay contacts. Basic Construction of all the electro-mechanical relays is same it has coil pins to energize the relay coil, common terminal “com”, Normal Open (“NO”) contact and normally close “NC” contact. These contacts are either open or close when the relay is in operation.

If we look at relays we will know that all relays are actually working on the principle of electromagnetic attraction. the emf electromagnetic force which is experienced on the Plunger or the armature is proportional to the Square of magnetic flux in the air gap or square of the current. Relays can be classified into hinged armature type, balanced beam type, moving coil type, plunger type, and reed type relay.
Relay Operation
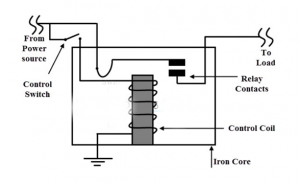
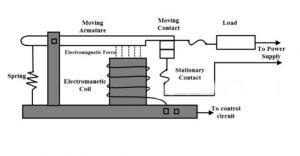
The relay operation is illustrated in the figures below. If we take any type of Electro-mechanical relay we will see that its major components are Armature, coil, and Contacts. A wire of certain gauge is wound on the magnetic core which makes an electromagnet. When supply is connected with the relay coil, the coil energizes and produces an electromagnetic field. The armature is actually a movable part of the relay and its function is to open and close the relay contacts, it is connected with the spring so that when no voltage is supplied to the relay coil it comes back to its default position. While the Contacts are conducting parts of the relay which connects the load and source circuits, these are the contacts which are damaged due to the arc phenomena.
Under Energized Condition
If the relay coil is connected with the desired voltage source, the coil of the relay will be energized and produces the magnetic flux which is proportional to the current flowing through it. This magnetic field causes the contact to move “this is the common contact of the relay” so the common contact of the relay gets connected with the normally open contact.
Under De-energized Condition:
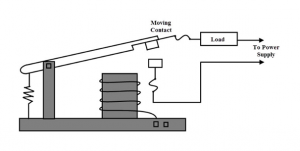
When the Power is disconnected from the relay coil, there is no magnetic flux production so the armature remains at its original position. As a result, there exists a very small air gap between the relay contacts. So in this situation, the NC contact of the relay is always connected with the common contact of the relay. That’s why it is called normally closed contact.
Relay Contact Types
Relays are available in different sizes, styles, configurations, and technologies. Depends on the suitability and application of the relay. Most importantly a relay has three contacts which are most important these contacts are common, normally closed and normally open. We usually talk about the relay in terms of poles and throws.
Poles and Throws
Depending on the number of poles and throws, relays are divided into the following 4 categories.
- Single pole single throw “SPST”
- Single pole double throw” SPDT”
- Double pole single throw” DPST”
- Double pole double throw” DPDT”
The below figure shows different types of relays based on their switching contacts. A single pole single throw relay which is normally known as the SPDT relay can control only one circuit and can be connected to only one output. It is used in an electrical system where we need to only turn ON or Turn OFF any electrical load, or it is used to signal a microcontroller. A single pole double throw relay connects one input circuit to one of the two outputs which are normally closed and normally open contacts.
A DPST “double pole single throw” relay has two poles and has a single throw and are most commonly used to connect two terminals of a single circuit at a time. For example, such type of relay can be used to connect both the phase and neutral terminals to the load at the same time.
A DPDT stands for “double pole double throw” this type of relay has two poles and two throws for each pole. With the help of these relays we can easily control the direction of motors, can be used for phase or polarity reversal. The Switching between the contacts depends on the coil when energized. For automatic operations, relay design calculations are performed to find the current needed to energize the relay.

Normally Open and Normally Closed Contacts
A normally open type relay indicates that the switch is open when the relay coil is demagnetized or de-energized, this condition happens only when the supply voltage is not connected with the relay coil. The following figures show the normally open, close and contacts changeover.
Whenever the relay coil is connected with a supply voltage, the relay coil is energized and makes a magnet. Then this magnet attracts the common contact of the relay to get connected with another contact to make a closed circuit. in case of the SPDT type relay, the normally open become close and the normally close becomes open. So this way a relay can be made to switch another circuit ON or OFF.

Driving a Relay
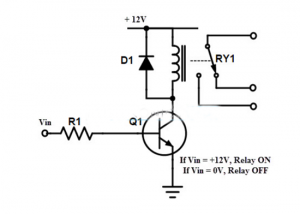
Relays can be controlled through a low voltage signal and can be used to control a high power circuit with a lower power circuit. To make a relay Operate, first of all, we will have to energize the relay coil by simply passing the current through the relay coil. Most of the relays which are available in the market are 12v and 24v. I will be using a 12v relay. 12v relay cannot be directly controlled by the controller, that’s why electromechanical relay needs a driver circuit. A driver circuit simply consists of an NPN or PNP type transistor and a resistor. Depends on the designer whether he/she wants to use the PNP or NPN. I will be using an NPN transistor in my Proteus simulation.
For the Driver circuit to design, first of all, we find the relay coil resistance using a digital multimeter. The relay voltage is already known which is 12v. then by using the Ohm’s law
V = IR
we can find the current, which will be needed to energize the relay coil to make enough magnet to attract the contact. After finding the relay coil current then select any general NPN type transistor whose collector current is greater than the relay coil current. In my case, I will use 2n2222 type transistor because it is cheap, easily available in the market and moreover it can handle much more current than the calculated value which was 32ma.
A 10k resistor is connected with the base of the 2n2222 NPN transistor as it’s a bjt bipolar junction transistor and it’s a current controlled device so that’s why a 10k resistor must be added to limit the current. then we get the below circuit. through this circuit, we can control an electromechanical relay through a microcontroller.
Relay Testing
All electro-mechanical Relays under heavy loads needs regular checkups of their Functionality for reliable performance. As an electromechanical relay has movable parts which wear out with time. The Arc phenomena which cannot be neglected and due to which the electromechanical relays life span decrease. And also the purpose of this thesis is to present the idea of spark/arc suppression using an electromechanical relay and solid state relay.
Relay Applications
- Lighting control systems
- Telecommunication
- Industrial process controllers
- Traffic control
- Motor drives control
- Protection systems of electrical power system
- Computer interfaces
- Automotive
- Home appliances
-
Solid State Relay Construction and Working
Unlike “EMR” Electro-mechanical relay which performs switching with the help of moving contacts when the coils is energized so it makes use of the magnetic field when voltage is supplied, when we look the inside construction of a solid state relay we come to know that The solid state relay has no moving parts and make use of the electrical components and optical properties of solid-state semiconductors to perform its input/output switching functions and isolation.
The solid state relays just like the normal “EMR” electro-mechanical relay provides complete electrical isolation b/w their input and output contacts, acting as a conventional electrical switch. It offers almost infinite resistance when its non conducting or open, and offers a very low resistance when in conducting state “close”. the SSR solid state relays can be designed for both AC or DC currents switching using TRIAC, SCR or switching transistor.
As discussed above the electro-mechanical relays have a limited contacts life cycle as it has moving parts and contacts damaging due to the arc phenomena. Electromechanical relays have low switching speeds while solid state relays have no such limitations.
Solid state relays have no moving parts to wear out, and in SSR we have no contact bounce issue, and moreover, the “ON” and “OFF” speed of the Solid state relays is really fast than the “EMR” electro-mechanical relays, as the Solid State Relays has no moving parts. Solid state relays have zero voltage turn-on and zero current turn-off capability which helps in eliminating the electrical noise and transients and make no sound like electromechanical relays.
Solid State Relay Input
Opto-isolators which is also called as the optocoupler is one of the most main components of SSR solid-state relay, which contains one or more ir led “infrared light emitting diode” or led light source. The optocoupler isolates the input from the output.
The led portion of the SSR makes the driver section of the SSR and it can be controlled through a signal from a microcontroller, which I will show you once I will be discussing the project simulation designed in Proteus. The led inside the optocoupler works with the photosensitive transistor, Darlington pair or triac. When voltage is applied to the led from a controller it illuminates and then its light falls across the gap on a phototransistor /photo-triac.
As a result of which the SSR is turned “ON”. So this way we can control an SSR through a low voltage signal.
A voltage greater than the minimum value which is normally 3 volts is applied at the input of the Solid State Relay. to bring it into conduction mode, so the solid state relay turns “ON”. this dc voltage/signal may be derived from a mechanical switch like a relay, push button, etc, a logic gate or micro-controller, as shown.
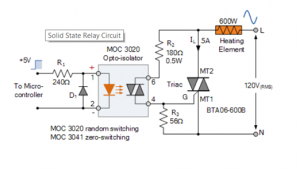
Solid State Relay DC Input Circuit:

The led used inside the optocoupler needs about 10mA to light up reasonably to its maximum value of 50mA. But as the microcontroller on its digital pins can supply maximum 30mA so we can say it can supply current ranging from 10mA to 30mA. we need to put a series resistor.
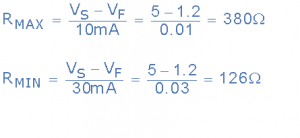
so from this calculation we then decide the value of the resistor to be used we can use a resistor between 126 ohms and 380 ohms. I will be using 330 ohm’s resistor. Because I have practically used this resistor it works just fine and doesn’t damage the led.
This Article covered both the electromechanical relay and Solid State Relay. And now we know how both switches work and what are their advantages and disadvantages.
Discover more from Electronic Clinic
Subscribe to get the latest posts sent to your email.



