Smart Dustbin using Arduino, Ultrasonic Sensor, and Servo Motor
Last Updated on August 17, 2024 by Engr. Shahzada Fahad
Table of Contents
ABSTRACT:-
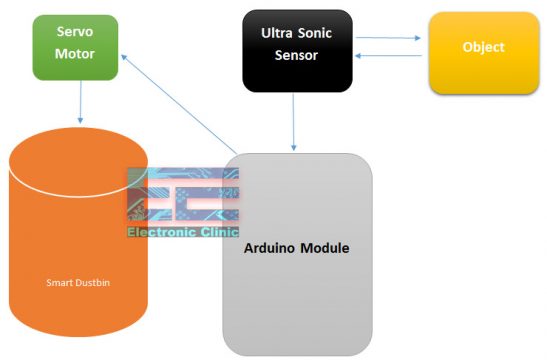
In the recent decades, urbanization has increased tremendously. At the same phase there is an increase in waste production. Waste management has been a crucial issue to be considered. This proposal is a way to achieve this good cause. In this project smart dustbin is built on a microcontroller based platform Arduino Uno board which is interfaced with the Servo motor and ultrasonic sensor. Ultrasonic sensor is placed at the top of the dustbin which will measure the stature of the dustbin.
The threshold stature is set at a particular level. Arduino will be programmed in such a way that when someone will comes in front of dustbin the servo motor will come in action and open the lid for the person to put the waste material into the dustbin. Once these smart bins are implemented on a large scale, by replacing our traditional bins present today, waste can be managed efficiently as it avoids unnecessary lumping of wastes on roadside. Foul smell from these rotten wastes that remain untreated for a long time, due to negligence of authorities and carelessness of public may lead to long term problems. Breeding of insects and mosquitoes can create nuisance around promoting unclean environment. This may even cause dreadful diseases.
Introduction to Smart Dustbin using Arduino and Ultrasonic Sensor:-
Dustbins (or Garbage bins, Trash Cans, whatever you call them) are small plastic (or metal) containers that are used to store trash (or waste) on a temporary basis. They are often used in homes, offices, streets, parks etc. to collect the waste. In some places, littering is a serious offence and hence public waste containers are the only way to dispose small waste. Usually, it is a common practice to use separate bins for collecting wet or dry, recyclable or non-recyclable waste.
In this project, I have designed a simple system called Smart Dustbin using Arduino, Ultrasonic Sensor, and Servo Motor, where the lid of the dustbin will automatically open itself upon detection of human hand. The smart dustbin is a carefully designed solution that solves the social issue of waste disposal; the smart dustbin identifies the kind of material being thrown inside it and segregates it into bio or non-biodegradable.
Amazon Purchase Links:
Arduino Nano USB-C Type (Recommended)
*Disclosure: These are affiliate links. As an Amazon Associate I earn from qualifying purchases.
Ultrasonic Sensors:-
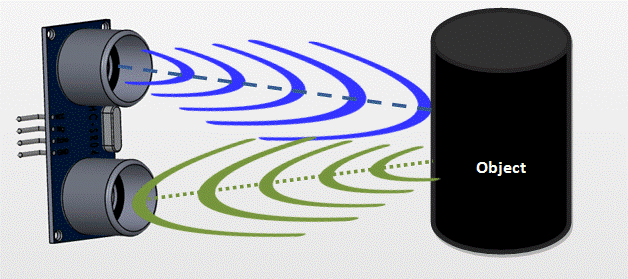
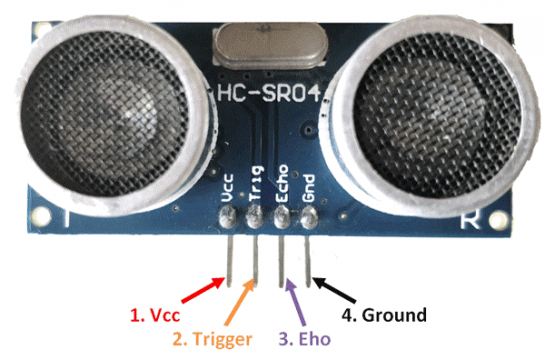
As shown in Figure 1 Ultrasonic sensors work by sending out a sound wave at a frequency above the range of human hearing. The transducer of the sensor acts as a microphone to receive and send the ultrasonic sound. Our ultrasonic sensors, like many others, use a single transducer to send a pulse and to receive the echo. The sensor determines the distance to a target by measuring time lapses between the sending and receiving of the ultrasonic pulse. Figure 2 shows the pin configuration for ultrasonic sensor module (HC-SRO4) which includes.
- Vcc (5 volt Supply )
- Trigger pin
- Echo pin
- Gnd (0volt)
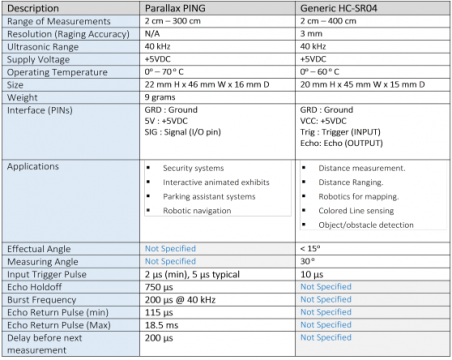
Ultrasonic Sensor Specifications
- Length: 4.5 cm (1 ¾ in)
- Width: 2.0 cm (¾ in)
- Height: 1.4 cm (½ in)
- Typical price: Around $4
- Supply voltage: 5V
- Operating voltages: 3V or 5V (trigger), 5V all other I/O ports
- Working current: 15mA
- Operating range: 2 cm to 400 cm (1 in – 13 ft)
- Claimed precision: 0.3cm, more realistically: 1cm
- Measuring angle: 15 degrees
- Quiescent Current : : <2mA
- Working Current: 15mA
- Effectual Angle: <15°
- Ranging Distance : 2cm – 400 cm/1″ 13ft
- Resolution : 0.3 cm
- Measuring Angle: 30 degree
- Trigger Input Pulse width: 10uS
Servo Motor:-
A servo motor is an electrical device which can push or rotate an object with great precision. If you want to rotate an object at some specific angles or distance, then you use servo motor. It is just made up of simple motor which run through servo mechanism. If motor is used is DC powered then it is called DC servo motor, and if it is AC powered motor then it is called AC servo motor. We can get a very high torque servo motor in a small and light weight packages. Due to these features they are being used in many applications like toy cars, RC helicopters and planes, Robotics, Machine etc.
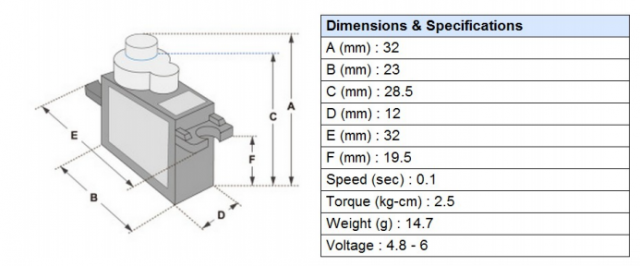
Figure 3 displaying the internal infrastructure of the servo motor and figure 4 shows the angular rotation of the servo motor that how it will perform its angular rotations when a signal will be provided by microcontroller.

Tiny and lightweight with high output power. Servo can rotate approximately 180 degrees (90 in each direction), and works just like the standard kinds but smaller. You can use any servo code, hardware or library to control these servos. Good for beginners who want to make stuff move without building a motor controller with feedback & gear box, especially since it will fit in small places. It comes with a 3 horns (arms) and hardware.
Micro Servo 9G Specifications
- Weight: 9 g
- Dimension: 22.2 x 11.8 x 31 mm approx.
- Stall torque: 1.8 kgf·cm
- Operating speed: 0.1 s/60 degree
- Operating voltage: 4.8 V (~5V)
- Dead band width: 10 μs
- Temperature range: 0 ºC – 55 ºC Position “0” (1.5 ms pulse) is middle, “90” (~2ms pulse) is all the way to the left. ms pulse) is all the way to the right, “”-90″ (~1ms pulse) is all the way to the left.
Basic Information Modulation:
- Analog Torque: 4.8V: 25.0 oz-in (1.80 kg-cm)
- Speed: 4.8V: 0.10 sec/60°
- Weight: 0.32 oz (9.0 g)
- Dimensions: Length: 0.91 in (23.1 mm)
- Width: 0.48 in (12.2 mm)
- Height:1.14 in (29.0 mm)
- Motor Type: 3-pole Gear Type: Plastic
- Rotation/Support: Bushing
Additional Specifications
- Rotational Range: 180°
- Pulse Cycle: ca. 20 ms
- Pulse Width: 500-2400 µs
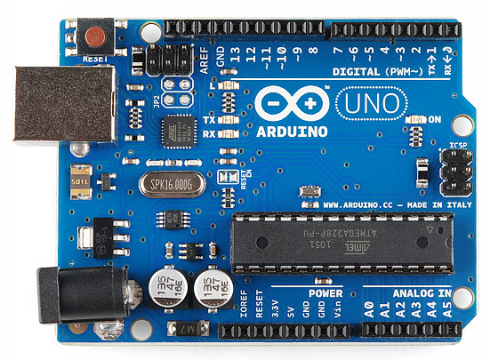
Arduino UNO:-
Arduino is an open-source platform used for building electronics projects. Arduino consists of both a physical programmable circuit board (often referred to as a microcontroller) and a piece of software, or IDE (Integrated Development Environment) that runs on your computer, used to write and upload computer code to the physical board.
The Arduino platform has become quite popular with people just starting out with electronics, and for good reason. Unlike most previous programmable circuit boards, the Arduino does not need a separate piece of hardware (called a programmer) in order to load new code onto the board — you can simply use a USB cable. Additionally, the Arduino IDE uses a simplified version of C++, making it easier to learn to program. Finally, Arduino provides a standard form factor that breaks out the functions of the micro-controller into a more accessible package.
The Uno is one of the more popular boards in the Arduino family and a great choice for beginners. The Arduino hardware and software was designed for artists, designers, hobbyists, hackers, newbies, and anyone interested in creating interactive objects or environments. Arduino can interact with buttons, LEDs, motors, speakers, GPS units, cameras, the internet, and even your smart-phone or you’re TV! This flexibility combined with the fact that the Arduino software is free, the hardware boards are pretty cheap, and both the software and hardware are easy to learn has led to a large community of users who have contributed code and released instructions for a huge variety of Arduino-based projects.
What’s on the board?
There are many varieties of Arduino boards that can be used for different purposes. Some boards look a bit different from the one below, but most Arduino have the majority of these components in common:
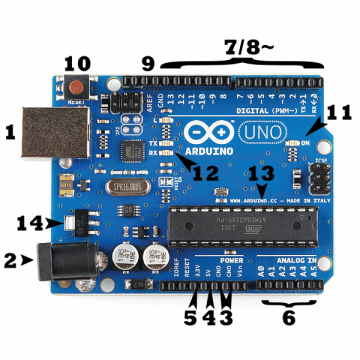
Power (USB / Barrel Jack)
Every Arduino board needs a way to be connected to a power source. The Arduino UNO can be powered from a USB cable coming from your computer or a wall power supply that is terminated in a barrel jack. In the picture above the USB connection is labeled (1) and the barrel jack is labeled.
The USB connection is also how you will load code onto your Arduino board. More on how to program with Arduino
NOTE: Do NOT use a power supply greater than 20 Volts as you will overpower (and thereby destroy) you’re Arduino. The recommended voltage for most Arduino models is between 6 and 12 Volts.
Pins (5V, 3.3V, GND, Analog, Digital, PWM, AREF)
The pins on your Arduino are the places where you connect wires to construct a circuit (probably in conjunction with a breadboard and some wire. They usually have black plastic ‘headers’ that allow you to just plug a wire right into the board. The Arduino has several different kinds of pins, each of which is labeled on the board and used for different functions.
- GND (3): Short for ‘Ground’. There are several GND pins on the Arduino, any of which can be used to ground your circuit.
- 5V (4) & 3.3V (5): As you might guess, the 5V pin supplies 5 volts of power, and the 3.3V pin supplies 3.3 volts of power. Most of the simple components used with the Arduino run happily off of 5 or 3.3 volts.
- Analog (6): The area of pins under the ‘Analog In’ label (A0 through A5 on the UNO) are Analog In pins. These pins can read the signal from an analog sensor (like a temperature sensor) and convert it into a digital value that we can read.
- Digital (7): Across from the analog pins are the digital pins (0 through 13 on the UNO). These pins can be used for both digital input (like telling if a button is pushed) and digital output (like powering an LED).
- PWM (8): You may have noticed the tilde (~) next to some of the digital pins (3, 5, 6, 9, 10, and 11 on the UNO). These pins act as normal digital pins, but can also be used for something called Pulse-Width Modulation (PWM). Think of these pins as being able to simulate analog output (like fading an LED in and out).
- AREF (9): Stands for Analog Reference. Most of the time you can leave this pin alone. It is sometimes used to set an external reference voltage (between 0 and 5 Volts) as the upper limit for the analog input pins.
Reset Button
Just like the original Nintendo, the Arduino has a reset button (10). Pushing it will temporarily connect the reset pin to ground and restart any code that is loaded on the Arduino. This can be very useful if your code doesn’t repeat, but you want to test it multiple times. Unlike the original Nintendo however, blowing on the Arduino doesn’t usually fix any problems.
Power LED Indicator
Just beneath and to the right of the word “UNO” on your circuit board, there’s a tiny LED next to the word ‘ON’ (11). This LED should light up whenever you plug your Arduino into a power source. If this light doesn’t turn on, there’s a good chance something is wrong. Time to re-check your circuit!
TX RX LEDs
TX is short for transmit, RX is short for receive. These markings appear quite a bit in electronics to indicate the pins responsible for serial communication. In our case, there are two places on the Arduino UNO where TX and RX appear — once by digital pins 0 and 1, and a second time next to the TX and RX indicator LEDs (12). These LEDs will give us some nice visual indications whenever our Arduino is receiving or transmitting data (like when we’re loading a new program onto the board).
Main IC
The black thing with all the metal legs is an IC, or Integrated Circuit (13). Think of it as the brains of our Arduino. The main IC on the Arduino is slightly different from board type to board type, but is usually from the ATmega line of IC’s from the ATMEL company. This can be important, as you may need to know the IC type (along with your board type) before loading up a new program from the Arduino software. This information can usually be found in writing on the top side of the IC. If you want to know more about the difference between various IC’s, reading the datasheets is often a good idea.
Voltage Regulator
The voltage regulator (14) is not actually something you can (or should) interact with on the Arduino. But it is potentially useful to know that it is there and what it’s for. The voltage regulator does exactly what it says — it controls the amount of voltage that is let into the Arduino board. Think of it as a kind of gatekeeper; it will turn away an extra voltage that might harm the circuit. Of course, it has its limits, so don’t hook up your Arduino to anything greater than 20 volts.
OBJECTIVES:-
The main objective of this project is to
- Design and build a prototype for an automatic open dustbin that can automatically open the lid when it detects the people who want to throw out their trash. It also can detect the level of the trash that inside the dustbin.
- To get familiar with the Arduino and the respective sensors how to use them for a cause.
- To analysis the dustbin program and set it up according to the physical distance for best Working.
Smart Dustbin Circuit Diagram:-
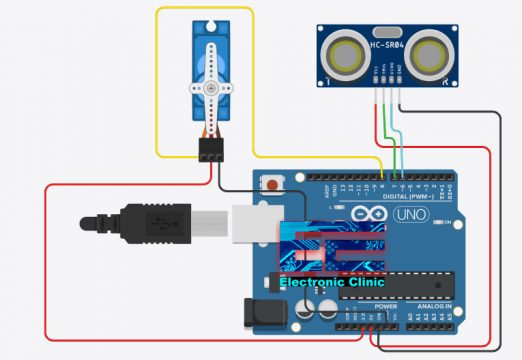
CONNECTIONS:-
- Servo Motor SG-90
- Red Pin (Servo Motor) with Arduino 3.3v
- Black Pin (Servo Motor) with Arduino GND (Ground)
- Orange Pin (Servo Motor) with Arduino Pin 8
-
Ultrasonic Sensor
- VCC (Sensor) with Arduino 5v
- Trig (Sensor) with Arduino Pin 7
- Echo (Sensor) with Arduino Pin 6
- GND (Sensor) with Arduino GND
Pictures of the Components used and the Smart Dustbin:-
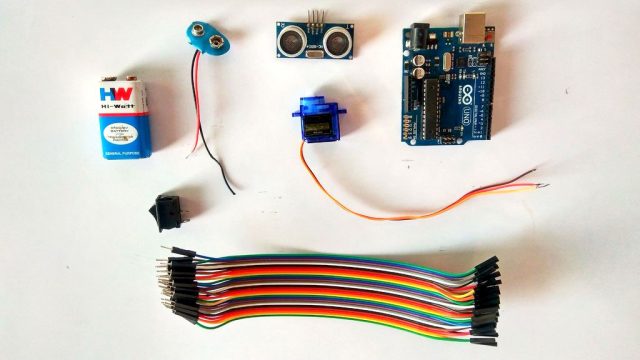

The Smart Dustbin as you can see in the picture above is built using Cardboard. This is a custom-made Smart Dustbin equipped with HC-SR04 Ultrasonic Sensor, Arduino, and a Servo Motor. If you don’t feel like making the Dustbin yourself then you can good ahead and purchase a readymade Dustbin from the market and modify it into a Smart Dustbin. Once I completed the basic model. Then I started working on the Arduino code.
Smart dustbin Arduino Programming:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 |
// Download Servo Library //https://www.electroniclinic.com/arduino-libraries-download-and-projects-they-are-used-in-project-codes/ #include <Servo.h> // Defines Tirg and Echo pins of the Ultrasonic Sensor const int trigPin = 6; const int echoPin = 7; // Variables for the duration and the distance long duration; int distance; Servo myServo; // Creates a servo object for controlling the servo motor void setup() { pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output pinMode(echoPin, INPUT); // Sets the echoPin as an Input Serial.begin(9600); myServo.attach(9); // Defines on which pin is the servo motor attached } void loop() { // rotates the servo motor from 15 to 165 degrees for (int i = 15; i <= 165; i++) { myServo.write(i); delay(30); distance = calculateDistance();// Calls a function for calculating the distance measured by the Ultrasonic sensor for each degree Serial.print(i); // Sends the current degree into the Serial Port Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing Serial.print(distance); // Sends the distance value into the Serial Port Serial.print("."); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing } // Repeats the previous lines from 165 to 15 degrees for (int i = 165; i > 15; i--) { myServo.write(i); delay(30); distance = calculateDistance(); Serial.print(i); Serial.print(","); Serial.print(distance); Serial.print("."); } } // Function for calculating the distance measured by the Ultrasonic sensor int calculateDistance() { digitalWrite(trigPin, LOW); delayMicroseconds(2); // Sets the trigPin on HIGH state for 10 micro seconds digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); duration = pulseIn(echoPin, HIGH); // Reads the echoPin, returns the sound wave travel time in microseconds distance = duration * 0.034 / 2; return distance; } |
Smart Dustbin Using Arduino Code explanation:
I started off, by adding the Servo.h header file. The Servo library download link is already given above.
#include <Servo.h>
Next I defined pins for the Trigger and Echo. The Trigger and Echo pins of the HC-SR04 Ultrasonic Sensor are connected with the Arduino’s pins 6 and 7 respectively.
const int trigPin = 6;
const int echoPin = 7;
// Variables for the duration and the distance
long duration;
int distance;
Servo myServo; // Creates a servo object for controlling the servo motor
Every Arduino Uno, Arduino Nano, Arduino Mega, etc have at least two functions, which are the void setup() and void loop() functions. Void means that these functions are not returning any values, while the empty parenthesis means that these functions does not take any arguments as the input.
The setup() function runs only one time with the Arduino board is turned ON.
void setup() {
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
Serial.begin(9600);
myServo.attach(9); // Defines on which pin is the servo motor attached
}
void loop() {
// rotates the servo motor from 15 to 165 degrees
for (int i = 15; i <= 165; i++) {
myServo.write(i);
delay(30);
distance = calculateDistance();// Calls a function for calculating the distance measured by the Ultrasonic sensor for each degree
Serial.print(i); // Sends the current degree into the Serial Port
Serial.print(“,”); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
Serial.print(distance); // Sends the distance value into the Serial Port
Serial.print(“.”); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
}
// Repeats the previous lines from 165 to 15 degrees
for (int i = 165; i > 15; i–) {
myServo.write(i);
delay(30);
distance = calculateDistance();
Serial.print(i);
Serial.print(“,”);
Serial.print(distance);
Serial.print(“.”);
}
}
// Function for calculating the distance measured by the Ultrasonic sensor
int calculateDistance() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH); // Reads the echoPin, returns the sound wave travel time in microseconds
distance = duration * 0.034 / 2;
return distance;
}
All the Serial.println() functions used in the above programming can be commented or deleted. These functions are only used for the debugging purposes.
Smart Dustbin Project Testing:
One there is no one in front of the Ultrasonic Sensor the Smart Dustbin Lid remains closed.
Discover more from Electronic Clinic
Subscribe to get the latest posts sent to your email.




could you please give me the code of 2 nos ultrasonic sensor 2 nos of sevo motor.
Can now the what is the function of the systematically diagrams of that smart trash can?